|
|
|
|
|
|
|
|
VECTOR CALCULUS
Deriving radial & tangential acceleration |
|
|
|
|
|
|
|
|
I don't like
mathematical proofs; I'm just not particularly good at them. I'm a
little better at derivations, but not by much. However, this is one
derivation that I do like, so I'll work through it here as my favorite
vector calculus derivation.
Like most math and physics problems, they
can be solved in a variety of ways, so this is only one approach. It
happens to be the approach I think is most fundamental, however.
I am going to work through this problem the
way I wish these problems were presented during school, so this is my method
and it is the way I would teach the problem. What is my method?
The primary element is that I create the organized spaces in my brain before
I try to fill them up with numbers. |
|
|
|
|
|
|
|
1. |
Q:
What are we about to do?
|
A: We are going to develop a general expression
for radial and tangential acceleration. However, we will only consider
radial acceleration. |
|
|
|
|
|
|
|
2. |
Result:
ar = v2 / r
|
This will be the end result of our efforts.
It's the answer. |
|
|
|
What does the equation mean? This is the
acceleration felt as your body gets "pushed" while seated in a turning vehicle.
It is radial acceleration. |
|
|
|
|
|
|
|
|
3. |
Relevance
|
Why should you care? |
|
|
|
In this particular case, I was at work in Afghanistan
when a former Marine asked me about flying the F-15. The conversation
got into how many g's the F-15 can pull and how tight the turn radius was.
I explained the turn radius depends only on speed and g-loading; it's a
simple mathematical relationship where the g-loading equals the velocity
squared divided by the radius. Here's the physics formula:
a = v2/r
G-loading is how many times the force of gravity can
be felt while in a turn, so that "a" is the g-loading times the force of
gravity. Since an F-15 can pull 9 g's at 440kts, it's a matter of
solving for "r" and making a few unit conversions:
r = v2/a
Use dimensional analysis to convert 440 kts into ft/s:
440 kts = (440 nm / hr)(1 hr / 3600 s)(6076 ft
/ nm) = 746 ft/s
Acceleration is g-load times force of gravity:
a = 9 * 32 ft/s2
Solve the equation:
r = (746 ft/s)2 / (9)(32 ft/s2)
= ~1900 ft
Sanity check: This answer is about right.
The tightest an F-15 can turn is more like 2500 - 3000 ft because that 1900
ft is an instantaneous capability. At 9 g's, the airspeed rapidly
decays and the g-loading falls off, so 2500 - 3000 ft over 180 - 270 degrees
of turn is more realistic, but the math is accurate for that snapshot in
time.
|
The tighter the turn, the harder it is for an enemy
aircraft to get into a position of advantage to point the guns and missiles
and vice versa. 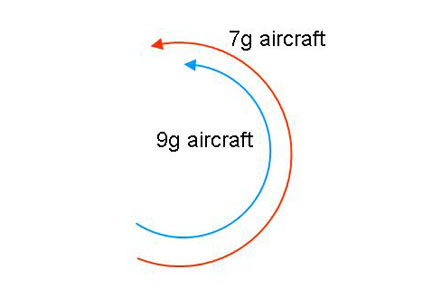
All the stuff that can kill an adversary comes off the
front of a jet fighter: missiles and bullets. If you can keep your
nose on the other aircraft (or keep the enemy's nose off), then you can win
the engagement. A higher g aircraft can turn tighter and outmaneuver
an opponent.
I had one opportunity to fly against F-14 Tomcats
during a Roving Sands mission. I'm used to training against fellow
F-15 or F-16 aircraft, which are 9g capable jets. The F-14 is about a
7g aircraft. When I first saw the F-14s, I was in a position of
advantage up high and I rolled in to attack. There were three of them,
and the first thing that struck me was how big they were... and this is
coming from an F-15 driver! The Tomcats immediately threw out their
wings and started a defensive turn. To be honest, I wondered what they
were doing at first because they just couldn't turn tight enough to prevent
my attack. I just dialed up 9g's, and starting at the back of their
pack I just drilled each one with a gun shot as they quacked.
To be fair, the F-14 is a third generation fighter (vs
4th), and it is meant for fleet defense, so it's not a contest. It
does, however, make a nice movie prop. |
|
|
4. |
Coordinate System
|
Always draw a coordinate system for a physics
problem! |
|
|
|
Several coordinate systems are available, so it's really
a matter of choosing the most convenient system to describe the problem.
We are most familiar with the Cartesian system, but curvilinear (polar)
coordinates are a close second for describing rotational or curvilinear
motions |
|
|
|
|
 |
I did draw the typical x-y axes, but just for reference.
It's the r and theta which count. We're only working in two dimensions
since it's a flat page and I'm not trying to describe another dimension of
movement. It only takes two coordinates to fully describe any place
our particle "P" can be, so this is a two-degree of freedom (2-DOF) system.
Although I could choose whatever direction I want for positive movement, the
only thing that matters is consistency. I've chosen theta as
increasingly positive in the ccw direction and r is positive as it moves
away from the origin. I mentioned that I think
the vector calculus version (my version!) is the best derivation.
The biggest reason is no conversion from Cartesian to polar is required.
I mean seriously... if we chose to work a problem in polar coordinates and
then have to fumble around with a Cartesian to polar conversion (using sine
and cosine), what is the point? Google it. Most derivations use
sine and cosine when they profess to be a polar coordinate system
derivation. Why not just throw in an elliptical coordinate conversion
while they're at it? |
|
|
|
 |
r and theta are the vectors to identify
point P and consist of both magnitude and direction. Several
conventions exist for writing the unit vectors for curvilinear systems, but
I'll use e-sub-r and e-sub-theta as drawn. These are the "unit"
vectors since they always have a length of one. It's easiest to draw
them from point P. They are always perpendicular to each other.
e-sub-r is always aligned outward from the origin and e-sub-theta is always
oriented in the direction of angle theta. The
vector r is properly written as (using bold to indicate a vector):
r = rer
That's it. However, it begs the question as to
why there is no theta component. I still don't have a perfect answer
for this, but the angle has no point of reference since there is no "x-axis"
to start from; it only indicates a positive movement direction. The
position vector r starts at zero from the origin, but there is no
"zero" for theta.
|
|
|
5. |
Vector Basis Moves
|
Every motion (position, velocity, acceleration)
can be expressed in the originally described coordinate system! |
|
|
|
If those unit vectors move, they move "incrementally" in
orthogonal directions. As point P moves around, the position vector
r stays fixed at one end to the origin and the e-dot velocities of those
unit vectors move in some direction of the original coordinate system; it's
just a matter or rewriting those unit vector velocities back into the
coordinate system. This part is the key to all
of vector calculus! This is the difficult part and everything else is
just calculus. |
How fundamental is the above statement? It's
fundamental enough to get written in bold. If we said this was a 2-DOF
system using only two coordinates to fully describe the motion, then no
matter what happens, we should still be able to write the equation in the
same two coordinates. |
|
|
|
 |
e-sub-r is a unit vector, and if it moves (as point P
moves), it has a velocity of e-dot-r in the e-sub-theta direction.
Therefore, e-dot-r can be rewritten as an angular velocity magnitude of
theta-dot in the e-sub-theta direction.
e-sub-theta also moves, and in that very infinitesimal manner, e-dot-theta
moves in the negative e-sub-r direction with a velocity of theta-dot.
Getting this part correct is key to the entire
process. These are not big moves, but as with calculus in general,
they are infinitesimal moves and can be pictured to make those slight
movements in the original coordinate system.
Now it's just a matter of using the product rule over
and over again to get the solution we're after. |
|
|
|
|
|
|
|
6. |
The
Derivation
|
|
|
|
|
 |
Start with the position vector.
Take the first time derivative of position, using the
product rule for each multiplier: the derivative of r times e-sub-r plus r times
the derivative of e-sub-r. It's standard product rule and those
unit vectors count in the process!
Now, we can't do much with that e-dot-r term, so
rewrite it back into the original coordinate system as discussed above.
This is velocity in polar coordinates. |
|
|
|
 |
Take the second time derivative to get acceleration.
It's just a matter of the product rule again. Velocity had two terms
and each of those terms appear in the brackets. The first velocity
term had two multipliers, so each one of those gets their own term from the
product rule of calculus. The three multipliers result in a three term
set in the second brackets. Rewrite the pesky
e-dot-r and e-dot-theta terms back into the original coordinate system as
discussed in Section 5 above.
|
|
|
|
 |
Just gather up the terms and we have the general form of
acceleration in polar coordinates. All that
remains is to make sense of the result based on the goal we started with. |
|
|
|
|
|
|
|
7. |
The
Result
|
|
|
|
|
Here's the coordinate system we set up: |
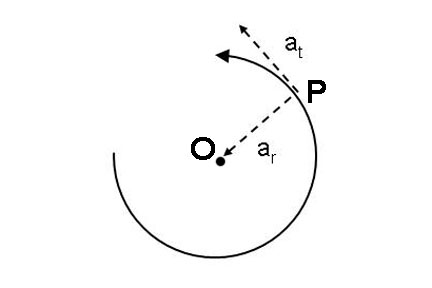
Here's the same coordinate system, written for a particle
P moving in a circular path with both tangential and radial acceleration as
depicted. It's the same thing as written to the left. |
|
|
|
|
 |
|
|
|
Looking at the generalized result of the derivation, we
have both components, radial, e-sub-r and tangential, e-sub-theta: |
|
|
|
|
 |
|
|
|
|
Let's look at only the radial component since that's
where we started and we're interested in that acceleration we feel pushing
us in our turning vehicle, or the g's felt by a maneuvering F-15: |
|
|
|
|
 |
This is a vector component in the e-sub-r direction;
radial acceleration, so we know the direction. The magnitude of this
acceleration is in the parentheses. The first term, r-dot-dot, is
simply the acceleration of the particle P if it was moving straight away
from the origin in a straight line; no turning.
If we are holding a constant radius turn, then we're not moving in the r
direction, so r-dot-dot is zero.
This leaves us with only the second term, minus r
theta-dot-squared. |
|
|
|
|
|
|
|
7. |
Relationships
|
|
|
|
|
There are a lot of notation conventions and other
standard relationships to help get the result into the form we want.
Here's where we are: |
|
|
|
|
r-dot-dot = (-r)(theta-dot)2 |
This is the above equation, acceleration in the radial
direction when the radius of turn is constant. |
|
|
|
r-dot-dot = a |
r-double-dot is the second time derivative of r, which is
just acceleration. Technically, it should be ar since we're
only considering that radial term. |
|
|
|
theta-dot = ω |
Just another convention. They are exactly the same. |
|
|
|
Now we have the following form: |
|
|
|
|
a = -rω2 |
|
|
|
|
Close! We're very close! Actually, we could
stop right here, but the problem is that omega term. If I want to
describe how fast a CD is spinning, then angular velocity, omega, is
perfect. However, we don't drive or fly in terms of angular velocity,
so having it written in this form is not very helpful. We drive or fly
with "instantaneous" forward speed. It's always a forward speed and
it's only due to forces acting on our motion that our straight line speed
keeps changing direction into this circular path. What we need is
tangential velocity, not radial (angular) velocity.
Lucky for us, we already solved it above! Go back
up to Section 6, line three and we have the first time derivative for
position r, which is velocity. It has both radial and tangential
terms, just like our acceleration equation.
Let's pick out the part we need, the tangential
component, and we have: |
|
|
|
|
r-dot = (r)(theta-dot)(e-sub-theta) |
From Section 6 above |
|
|
|
r-dot = (r)(theta-dot) |
Get rid of the e-sub-theta because we know we only want
this tangential term. |
|
|
|
v = rω |
Just some notation substitutions:
r-dot = v
theta-dot = ω |
|
|
|
Make the final substitution since ω = v/r: |
|
|
|
|
a = -rω2 |
|
|
|
|
a = -r(v/r)2 |
|
|
|
|
|
|
|
|
8. |
The
Result
|
|
|
|
|
|
|
|
|
|
a =
-v2 / r |
The final result we wanted from the beginning!
|
|
|
|
The only difference is the negative sign, and this is
technically correct. When we set up the coordinate system in Section
4, the e-sub-r vector pointed away from the center of the circle. The
negative sign means the acceleration is pointed toward the center of the
circle, opposite of the convention we set up. This means some force is
acting on our car (friction of turning wheels) or aircraft (lift) that is
accelerating the vehicle toward the center of the turn circle and our bodies
are constantly getting pushed by the vehicle toward the center. This
is why we "think we feel a force" pushing us away, like we want to get
thrown off the merry-go-round. The acceleration is inward, but we feel
the force of the solid vehicle pushing us in the direction of this
acceleration. |
|
|
|
|
This is the "tool" to solve our physics problems.
Everything we did to get here was just to build this tool. Rarely are
we asked to build our own tools like we did here; we just need to know which
ones to use to solve our problems. If I need a hammer to build a shed,
I just go to the tool store and buy a hammer. I don't melt a bunch of
metal and make my own hammer; someone else has already done that hard work
like all of the above steps. So, knowing the above formula, I can
easily answer the question about how tight an F-15 can turn based on speed
and g, just like when we started. |
|
|
|
|
Why bother with the derivation in the first place?
Mathematicians, scientists, engineers and good students don't like mysteries
unless they're watching a movie! By working through it at least once,
we can understand where it comes from logically. In a more esoteric
sense, if we ever do get stuck, or if we want to use our tools like a master
craftsman, then knowing where they came from can be helpful. |
|
|
|
|
|
|
|
|
9. |
Application
|
|
|
|
|
To finish this off properly, it is time to build the shed
using our new tool. We should work through several examples to know
how to apply the formula. Maybe later; I'm tired of typing for now! |
|
|
|
|
|
|